前書き
お久しぶりです、ケシゴムです
今回は高専ロボコンも終わり身辺整理をしていてだいぶ前に作った独ステ(独立4輪ステアリング・Swerve Drive)が出てきたのですが、今見ると設計的にダメだなーと思う箇所がたくさんあったので、捨てるくらいならレビューしてから捨てようと思い記事にしてみます!作られた経緯
もともと差動ステアリングは作ったことあったのですが、ちゃんとした独ステを作ったことはなく、さらにちょうど買ったBLDCが余っていたので作ってみることにしました。 また当時、東大RoboTechのステアに感化されたこともあり、かなりRoboTechを参考にして作ってました。 ちなみに足りてないパーツなどもあるため完璧な状態ではないです。外観
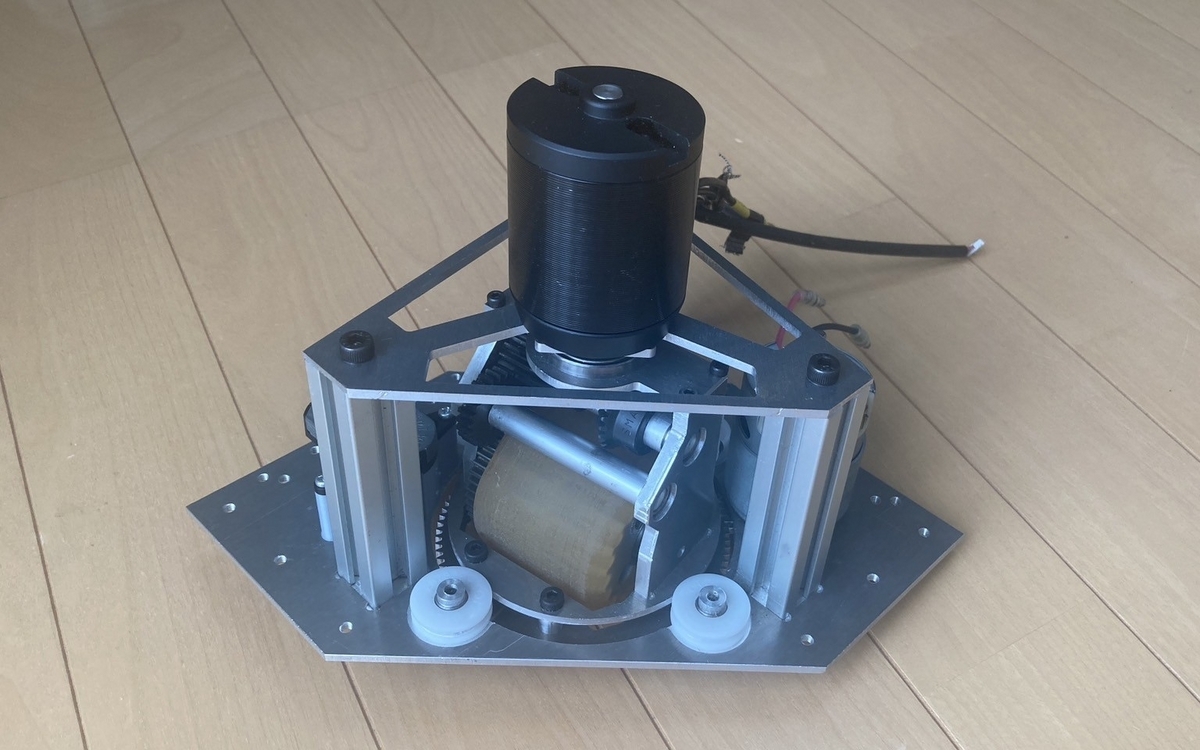
レビュー
分解しながらダメなところと一緒に機能を説明していきます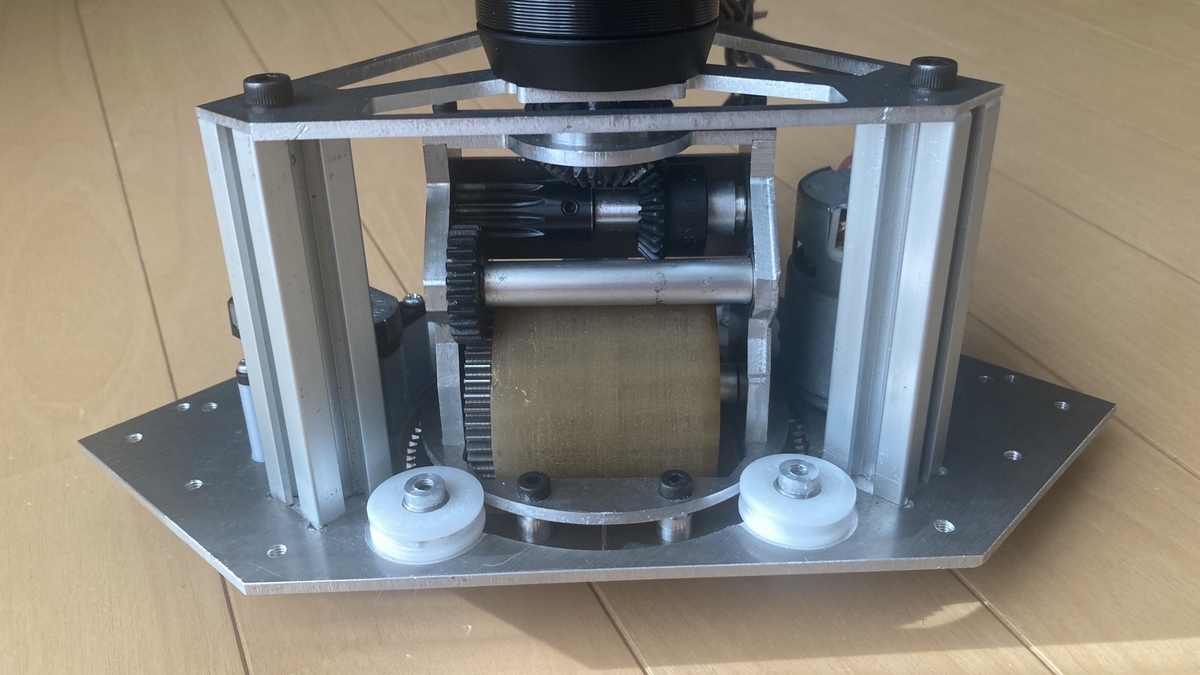
正面 
裏側 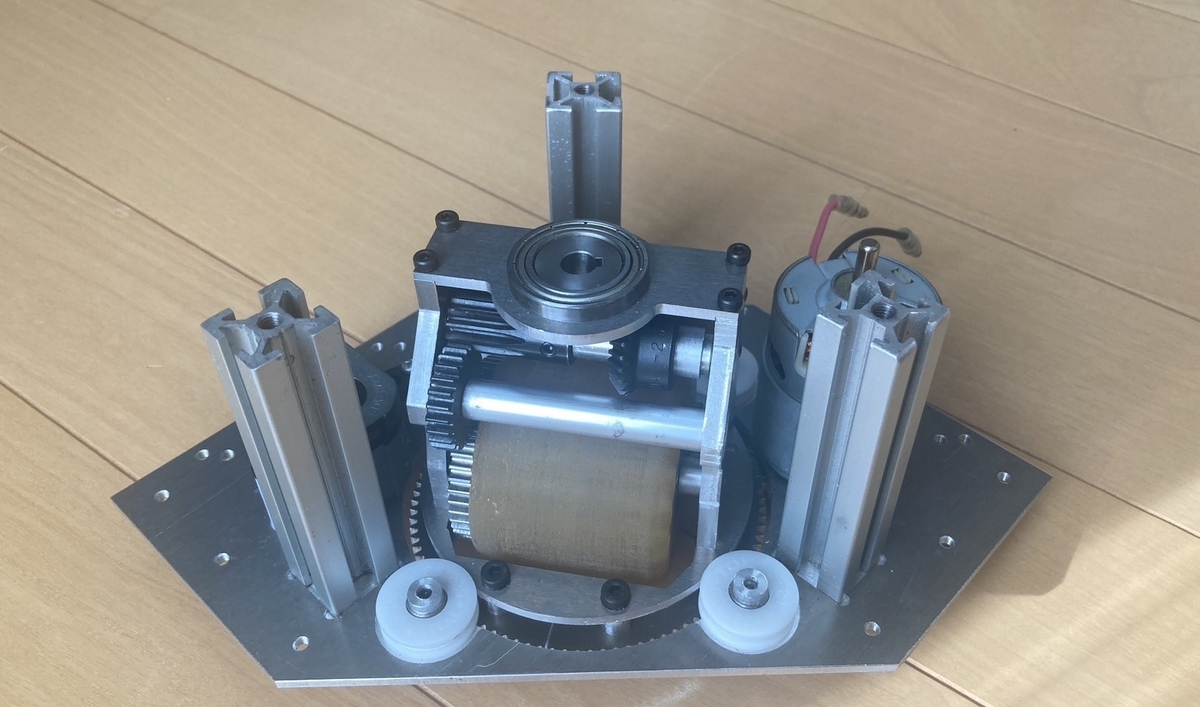
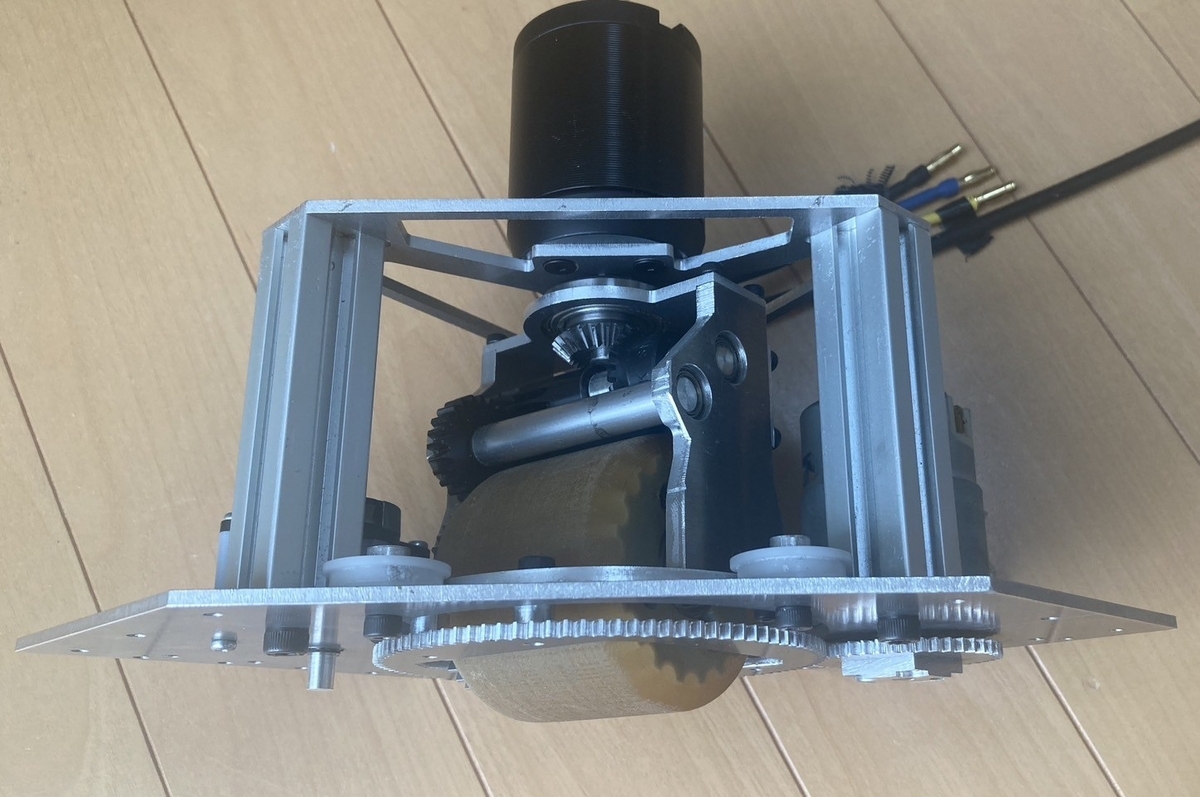
BLDCユニットを外した状態 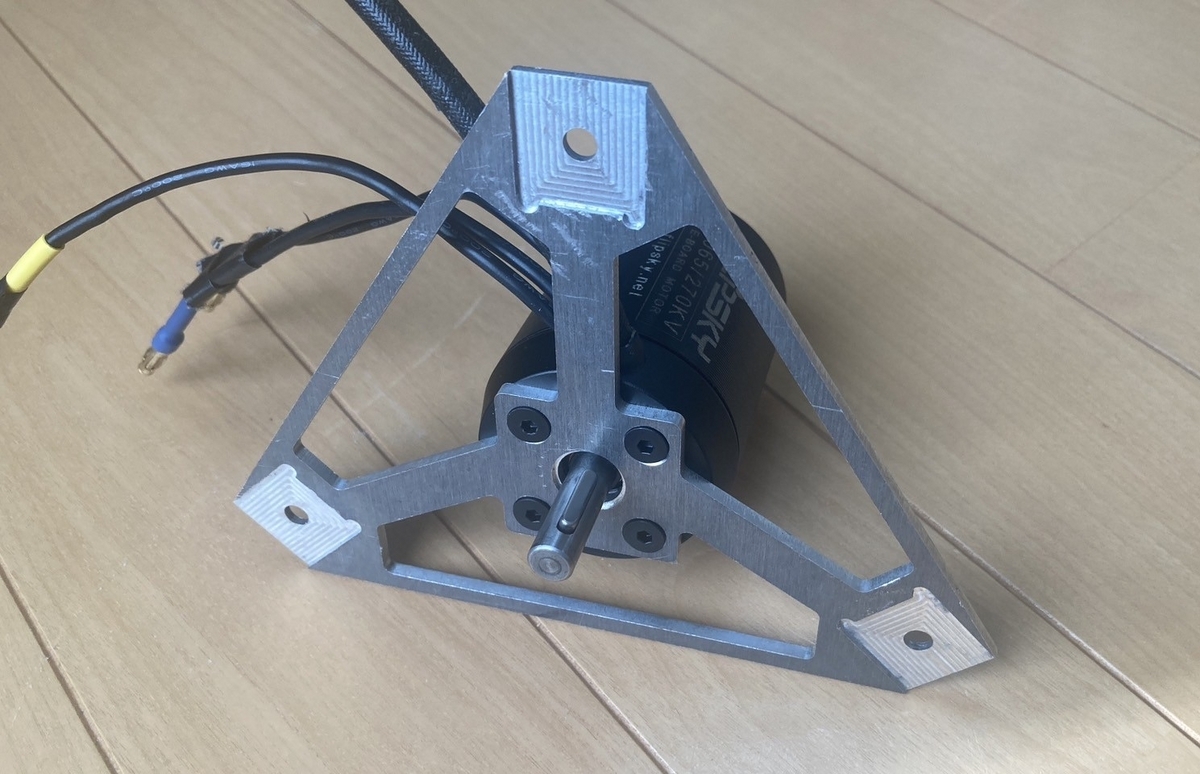
BLDCユニット 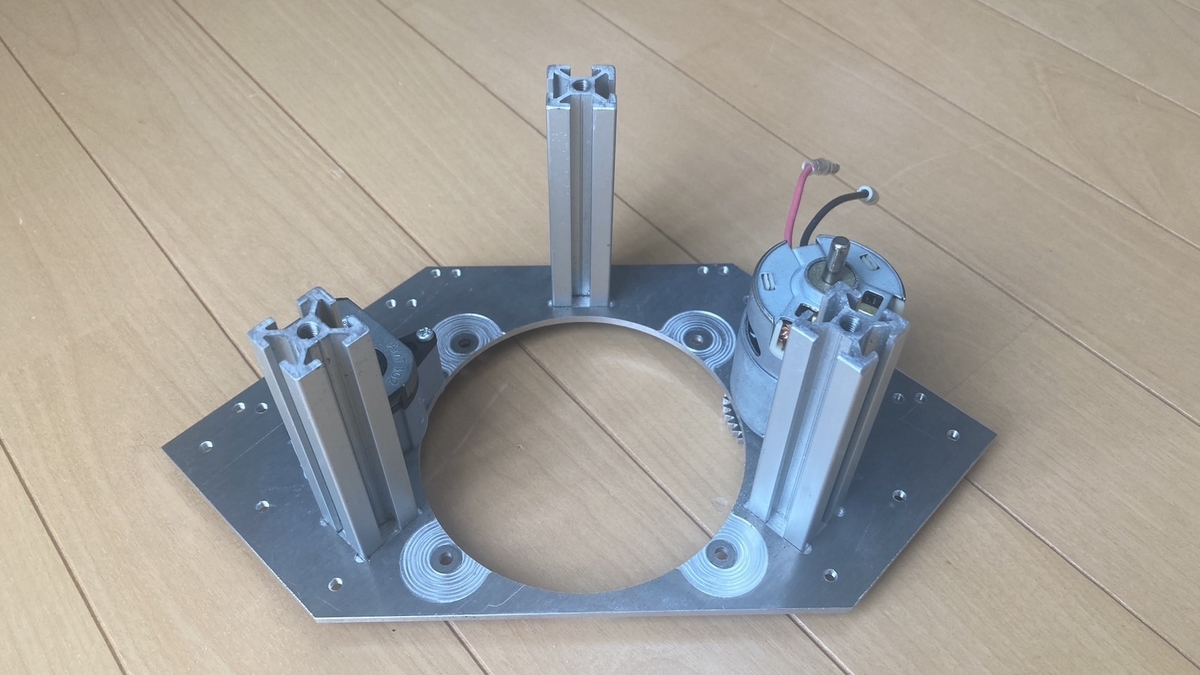
駆動ユニットを外した状態 
駆動ユニット 
H型POM製ベアリング 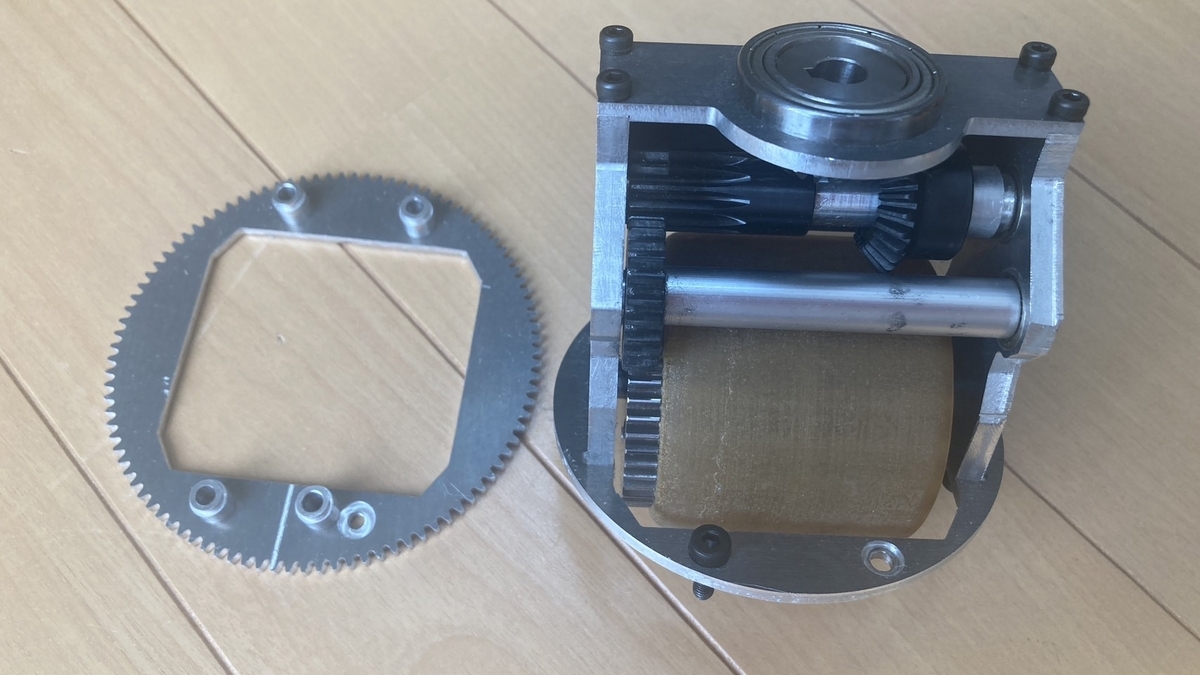
操舵ギヤを外した状態 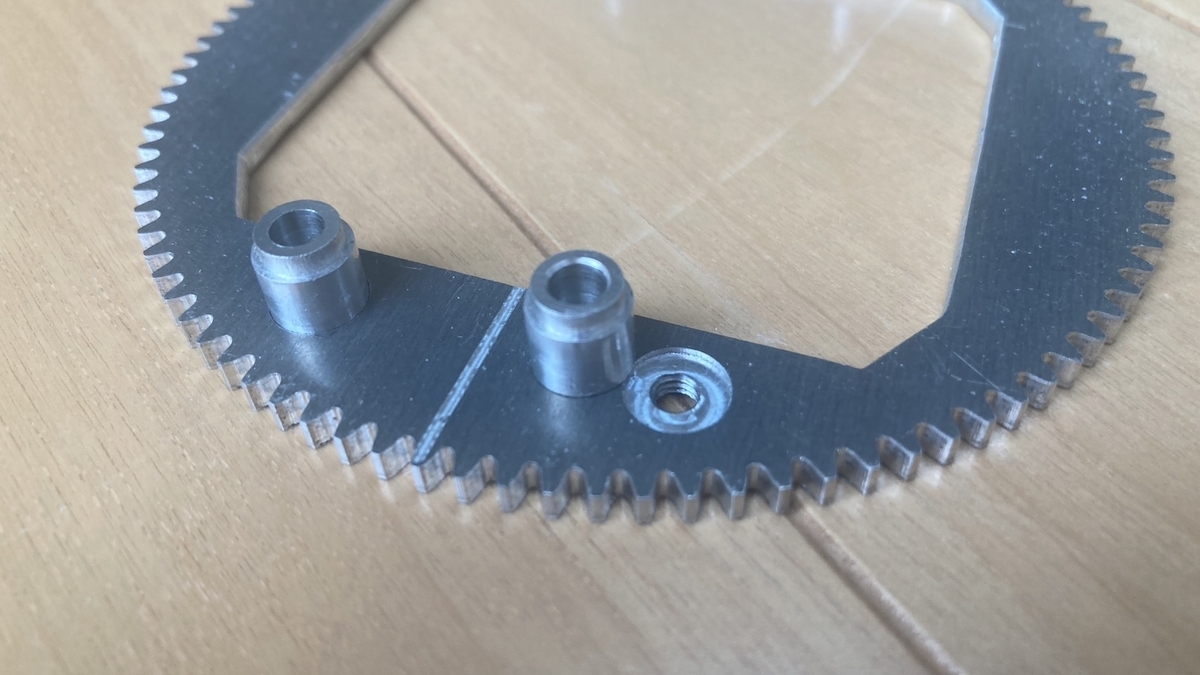
操舵ギヤ 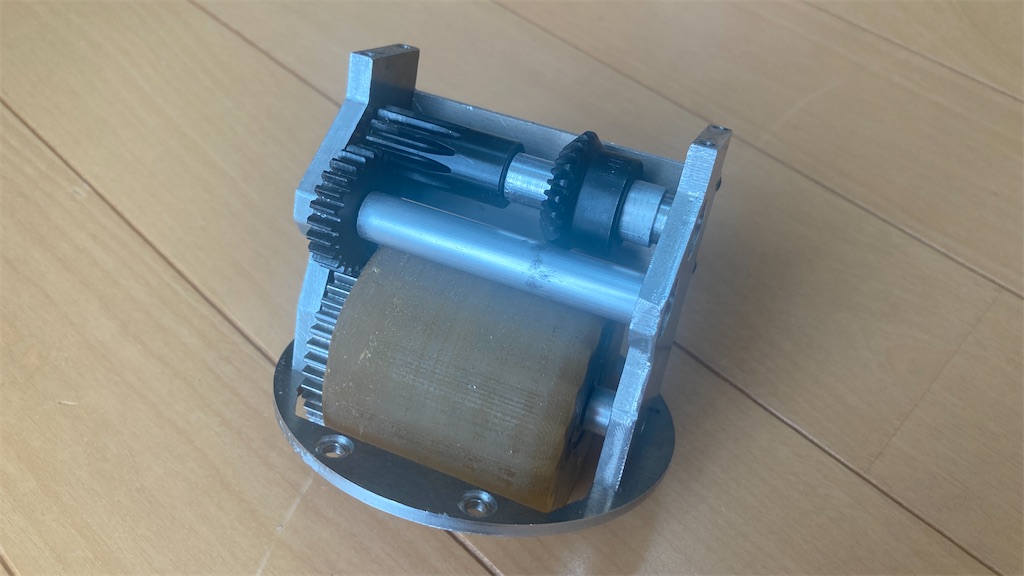
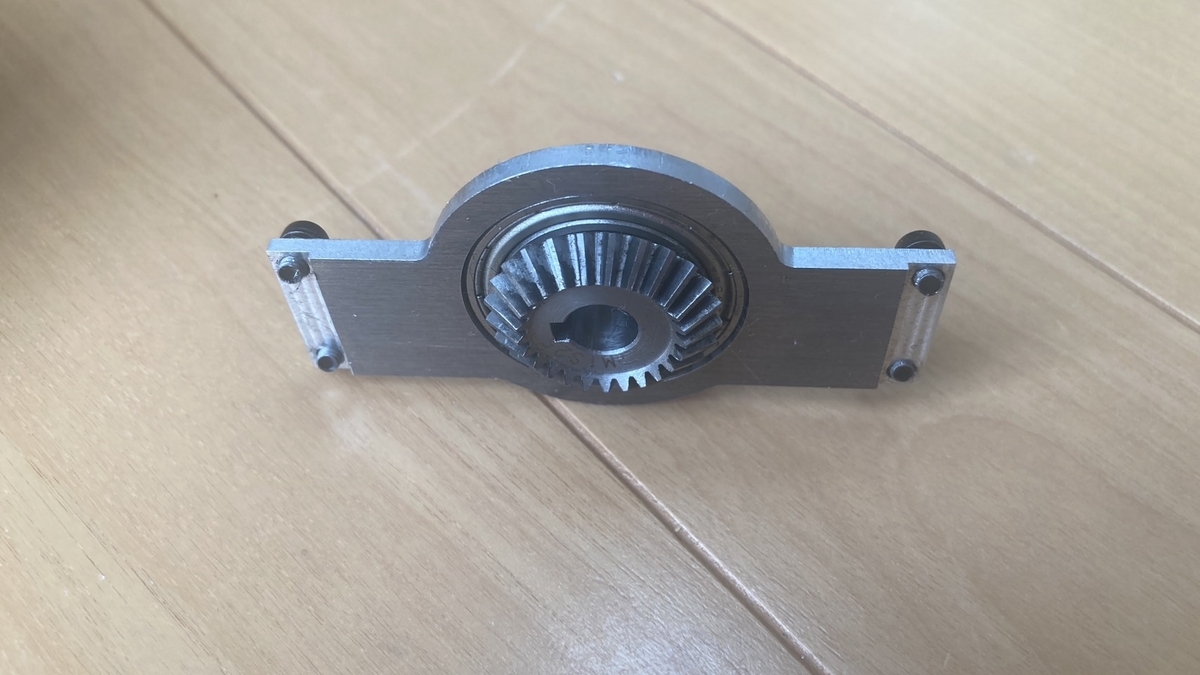
駆動用傘歯車 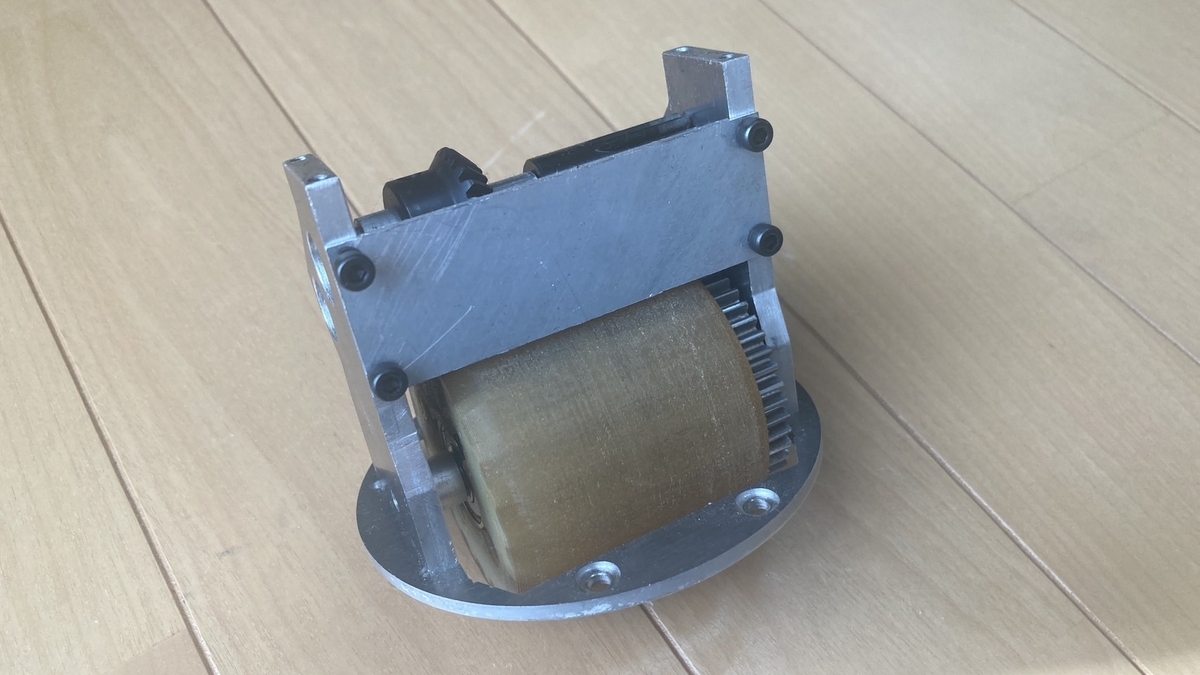
筐体安定化部分 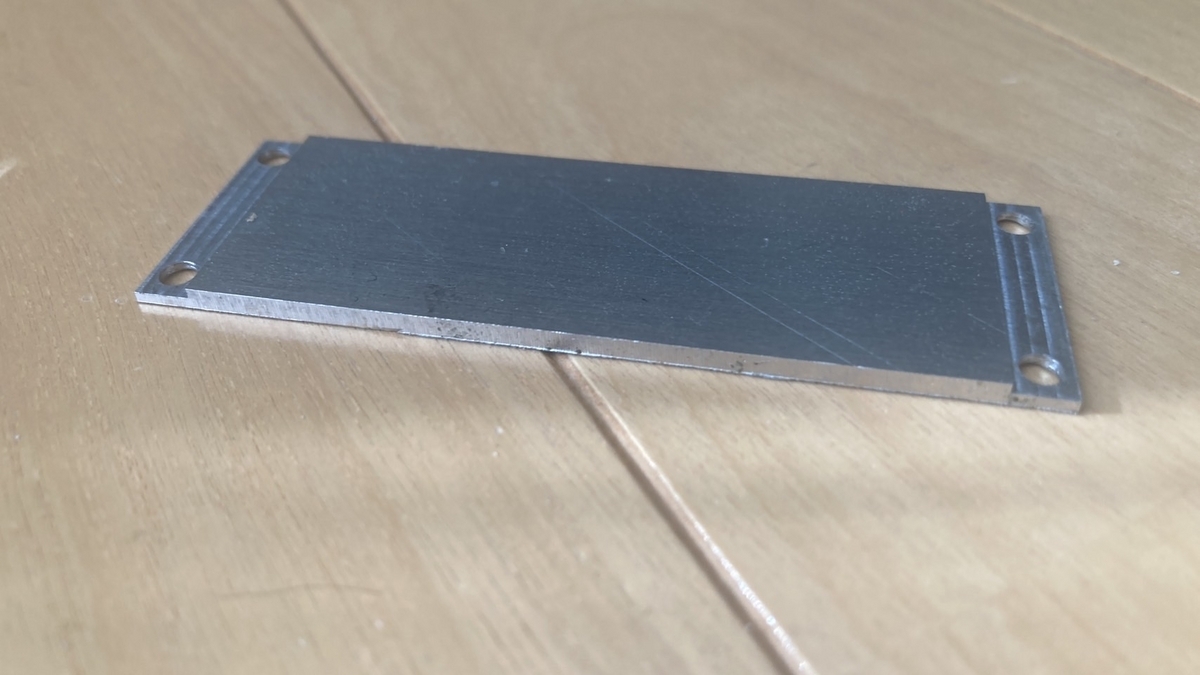
安定化パーツ 
タイヤ用ギヤと駆動ユニット土台の干渉 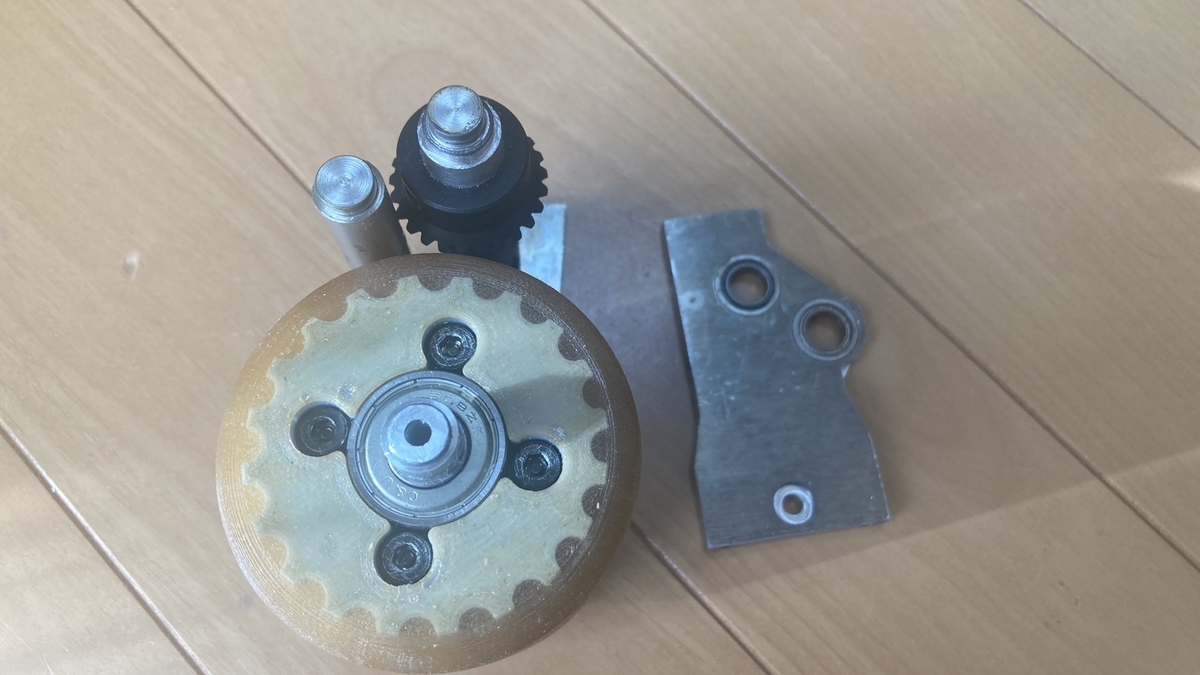
駆動ユニット分解 
被駆動部1 
被駆動部1の分解 
伝達全体 
被駆動部2 
タイヤとタイヤ用軸 
タイヤ正面 
タイヤ裏側 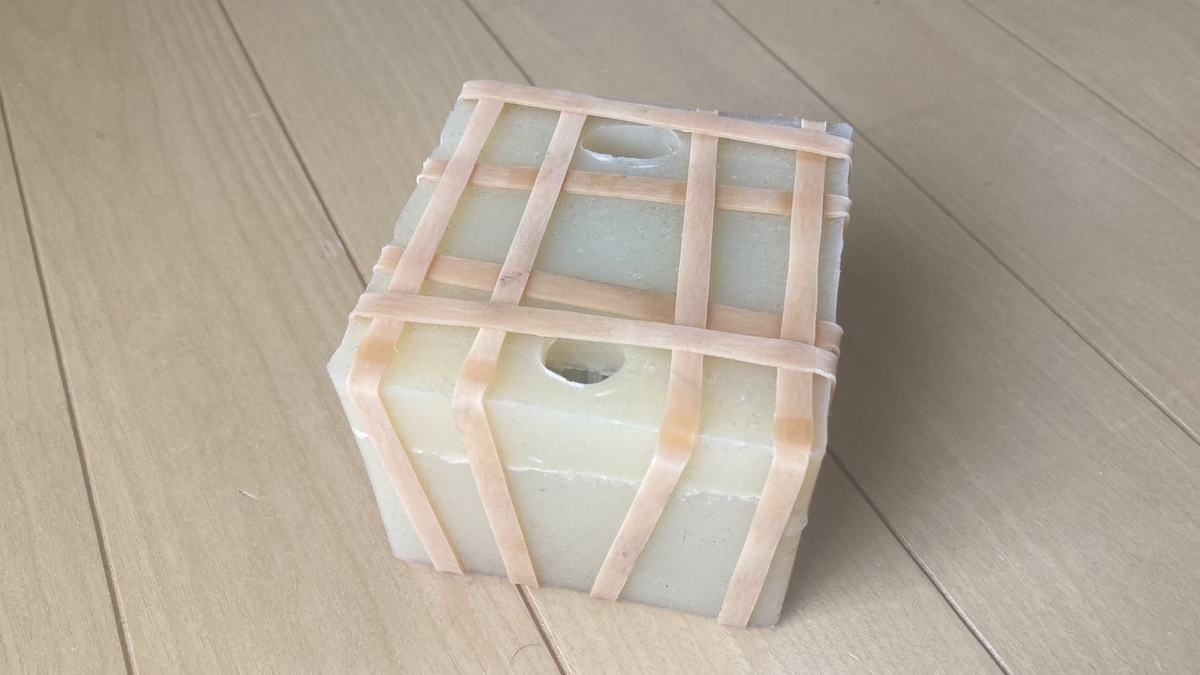
ウレタン型 
ウレタン型の中身 
操舵角検出用エンコーダ部分 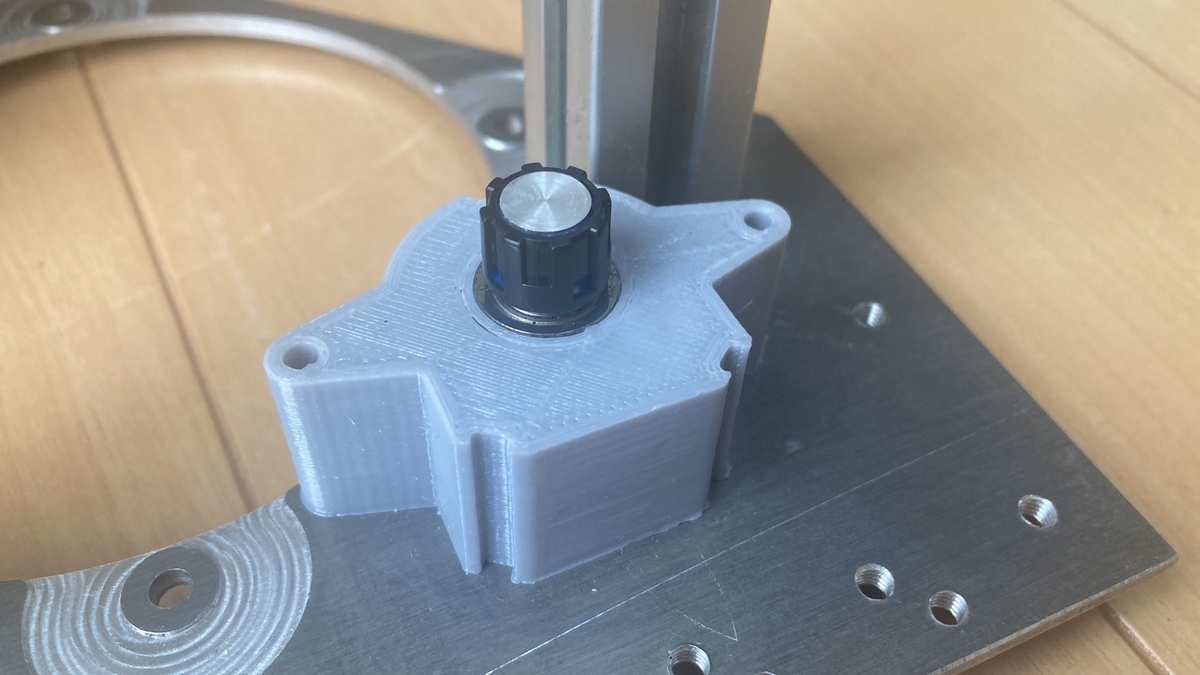
エンコーダ外した状態 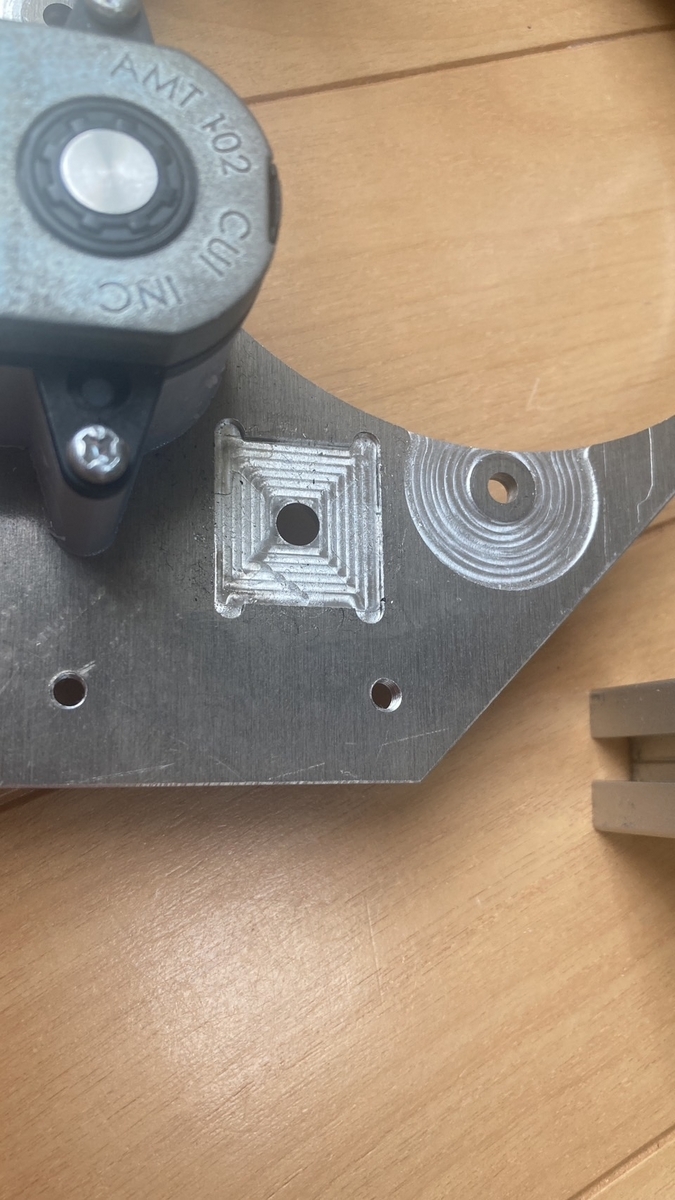
アルミフレーム用の段付き 
操舵のモーター固定部分 最後に
このステアは負の遺産であります。しかし分かっていても同じ道を通ってしまう後輩がたくさんいると思い今回この記事を起こしました。豊田Bの設計者の後輩たちはこれを見て同じ失敗をしないようにしましょう。
次はダイレクトドライブのちっちゃいステア作って回路制御含めて全部作ろっかな~
以上です。